
Raspberry Pi — это миниатюрная одноплатная компьютерная система, созданная с целью научить людей программированию и электронике. Она имеет невероятные возможности — от простых задач до создания собственных устройств и роботов. В этой статье мы рассмотрим, как с помощью Raspberry Pi можно создать мобильного робота для различных приложений.
Основные компоненты Raspberry Pi включают в себя микроконтроллер, оперативную память, порты USB, HDMI, а также GPIO (General Purpose Input/Output) — универсальные порты ввода/вывода, которые позволяют Raspberry Pi взаимодействовать с внешними устройствами. Дополнительно вы можете добавить модули, такие как Wi-Fi, Bluetooth, камеру или экран, чтобы расширить возможности вашего робота.
Создание мобильного робота с использованием Raspberry Pi состоит из нескольких этапов. Сначала вам необходимо выбрать подходящую мобильную платформу, на которую будет установлен Raspberry Pi. Затем нужно подключить Raspberry Pi к платформе и настроить его. Для управления роботом могут использоваться различные методы, такие как управление через Wi-Fi с помощью мобильного приложения или с дополнительного пульта управления. После настройки и подключения устройств, можно приступить к программированию робота и разработке его функционала.
Создание мобильного робота на базе Raspberry Pi — увлекательный проект, который может быть реализован даже новичком в программировании и электронике. Подключив свою фантазию и креативность к навыкам работы с Raspberry Pi, вы сможете создать собственного робота, который будет выполнять нужные вам задачи.
- Как создать мобильного робота с помощью Raspberry Pi
- Материнские платы Raspberry Pi
- Сравнение моделей
- Основные компоненты сборки
- 1. Плата Raspberry Pi
- 2. Моторы и колеса
- 3. Драйвер моторов
- 4. Аккумулятор
- 5. Каркас и крепежные элементы
- Подключение компонентов
- Программирование робота
- Тестирование и отладка
- Вопрос-ответ:
- Какие материалы и компоненты нужны для создания мобильного робота с помощью Raspberry Pi?
- Какую операционную систему можно использовать с Raspberry Pi для создания мобильного робота?
- Как программировать мобильного робота на Raspberry Pi?
- Какие датчики можно использовать для создания мобильного робота на Raspberry Pi?
- Как настроить беспроводное управление для мобильного робота на Raspberry Pi?
- Какие материалы мне понадобятся для создания мобильного робота с Raspberry Pi?
- Какой язык программирования лучше всего использовать для создания мобильного робота с помощью Raspberry Pi?
Как создать мобильного робота с помощью Raspberry Pi
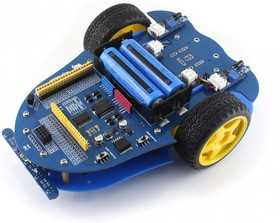
Для начала вам понадобится Raspberry Pi, мини-компьютер с открытым исходным кодом. Также вам потребуется пара моторов, колеса, аккумулятор и контроллер двигателей. Все это можно купить в специализированных магазинах.
После сборки и подключения компонентов, вы можете начинать программирование робота. Например, вы можете использовать язык Python и библиотеку для управления GPIO на Raspberry Pi.
Одним из способов управления мобильным роботом с Raspberry Pi является использование джойстикаа. Подключите джойстик к Raspberry Pi, установите необходимые библиотеки и напишите программу, которая будет читать значения с аналоговых пинов джойстика и управлять моторами робота.
Используя различные датчики и модули, такие как модуль для распознавания лиц или ультразвуковой датчик расстояния, вы можете добавить разные возможности вашему роботу. Например, вы можете научить его избегать препятствий или следовать за вами.
Важно помнить о безопасности при работе с роботом. Обязательно следите за тем, чтобы никакие провода не были обнажены и не мешали движению робота.
В конечном итоге, создание мобильного робота с помощью Raspberry Pi — это не только интересный и увлекательный проект, но и возможность научиться программированию и техническим навыкам.
Валериан Алексеев
Материнские платы Raspberry Pi
В серии микрокомпьютеров Raspberry Pi используются различные модели материнских плат, каждая из которых имеет свои особенности и возможности. Они представляют собой компактные платы, содержащие все необходимое для работы микрокомпьютера.
Одной из самых популярных моделей материнских плат Raspberry Pi является Raspberry Pi 3 Model B+. Она оснащена процессором ARM Cortex-A53 с тактовой частотой 1.4 ГГц, 1 ГБ оперативной памяти, HDMI-портом, Ethernet-портом и множеством других входов и выходов. Raspberry Pi 3 Model B+ поддерживает работу с различными датчиками, модулями, дисплеями и другими периферийными устройствами.
Другая популярная модель — Raspberry Pi 4 Model B. Она обладает более мощной аппаратной начинкой, включая 4-ядерный процессор ARM Cortex-A72 с тактовой частотой 1.5 ГГц, до 8 ГБ оперативной памяти, два порта USB 3.0 и два порта USB 2.0, два HDMI-порта и прочие интерфейсы.
Сравнение моделей
| Модель | Процессор | Оперативная память | Порты USB | HDMI-порты |
|---|---|---|---|---|
| Raspberry Pi 3 Model B+ | ARM Cortex-A53 1.4 ГГц | 1 ГБ | 4 USB 2.0 | 1 |
| Raspberry Pi 4 Model B | ARM Cortex-A72 1.5 ГГц | 1, 2, 4 или 8 ГБ | 2 USB 3.0, 2 USB 2.0 | 2 |
Каждая из моделей материнских плат Raspberry Pi имеет свои преимущества и подходит для разных задач. Выбор конкретной модели зависит от требуемых функций, производительности и бюджета проекта.
Основные компоненты сборки
Для создания мобильного робота с использованием Raspberry Pi вам понадобятся следующие основные компоненты:
1. Плата Raspberry Pi
Raspberry Pi — это небольшая одноплатная компьютерная плата с большими возможностями. Она позволяет выполнять различные задачи и управлять другими электронными компонентами.
2. Моторы и колеса
Для движения вашего робота вам понадобятся моторы и колеса. Вы можете выбрать различные типы моторов и колес, в зависимости от ваших потребностей и требований.
3. Драйвер моторов
Для управления моторами вам понадобится специальный драйвер моторов, который подключается к Raspberry Pi. Драйвер позволяет контролировать скорость и направление вращения моторов.
4. Аккумулятор
Для питания вашего робота вам понадобится аккумулятор. Вы можете использовать различные типы аккумуляторов, в зависимости от ваших потребностей и требований.
5. Каркас и крепежные элементы
Чтобы собрать все компоненты вместе, вам понадобится каркас робота и крепежные элементы, такие как винты, гайки и шурупы.
Это основные компоненты, которые вам понадобятся для создания мобильного робота с помощью Raspberry Pi. Кроме них, вы также можете использовать дополнительные компоненты и датчики в зависимости от ваших потребностей и требований.
Подключение компонентов
Для создания мобильного робота с использованием Raspberry Pi нам понадобятся следующие компоненты:
- Плата Raspberry Pi: основа проекта, на которую будут подключаться все остальные компоненты.
- Карта памяти: необходима для установки операционной системы Raspbian на Raspberry Pi.
- Моторы и колеса: обеспечивают движение робота. Моторы могут быть шаговыми или сервоприводами.
- Контроллер моторов: необходим для управления моторами. В качестве контроллера можно использовать Arduino или специальные платы.
- Аккумулятор: обеспечивает питание для Raspberry Pi и моторов.
- Датчики: можно подключить различные датчики, такие как датчики расстояния, датчики света и т. д.
- Камера: для создания видеозаписей или прямой трансляции с помощью Raspberry Pi можно подключить камеру.
Для подключения компонентов к Raspberry Pi, необходимо использовать различные интерфейсы и порты. Например, GPIO порты для подключения моторов и датчиков, USB порты для подключения камеры и других устройств.
Более подробную информацию о подключении конкретных компонентов можно найти в соответствующих руководствах и документациях.
Программирование робота
Python является одним из наиболее популярных языков программирования для Raspberry Pi. Он обладает простым синтаксисом и обширной документацией, что делает его отличным выбором для программирования робота.
Для начала программирования робота вам необходимо создать файл с расширением .py для вашей программы. Вы можете использовать любой текстовый редактор для этого, например, nano или vi.
Следующим шагом является подключение необходимых библиотек. Для использования библиотеки RPi.GPIO вам необходимо импортировать ее в вашу программу следующим образом:
import RPi.GPIO as GPIOЗатем необходимо настроить пины Raspberry Pi для подключения к моторам и другим компонентам вашего робота. Вы можете использовать функцию GPIO.setmode() для выбора режима нумерации пинов:
GPIO.setmode(GPIO.BCM)После этого можно определить пины, которые будут управлять моторами, и настроить их в качестве выходных с использованием функции GPIO.setup(). Например:
GPIO.setup(17, GPIO.OUT)В следующем шаге вы можете написать функции для управления движением робота. Например, функцию для передвижения вперед:
def forward():
# код для передвижения робота впередПосле написания необходимых функций, вы можете создать основной цикл программы, который будет вызывать эти функции в соответствии с вашими требованиями. Например:
while True:
forward()
# другие команды управления роботомВ завершение программы вы можете добавить код для очистки пинов Raspberry Pi с использованием функции GPIO.cleanup(). Например:
GPIO.cleanup()Программирование робота на Raspberry Pi может включать и другие возможности, такие как управление с помощью датчиков, обработка видео и многое другое. Важно учитывать требования вашего робота и использовать соответствующие методы и библиотеки.
Тестирование и отладка
После завершения создания мобильного робота с помощью Raspberry Pi следует провести тестирование и отладку, чтобы убедиться в правильной работе всех компонентов и функций робота.
Первым шагом в тестировании робота является проверка работы каждого компонента отдельно. Для этого можно использовать различные тестовые программы и утилиты. Например, для проверки работы моторов и сервоприводов можно написать и запустить простую программу, которая будет двигать каждый из них в разные стороны и проверять корректность их работы.
После тестирования отдельных компонентов робота можно приступить к тестированию его функций в целом. Для этого рекомендуется написать тестовые программы, в которых будет проверяться работа различных функций робота, например, передвижение по командам с помощью джойстика или выполнение определенных задач с помощью робота.
Важной частью тестирования и отладки мобильного робота является проверка его работы на различных поверхностях и в различных условиях. Например, можно проверить, как робот будет двигаться на ровной поверхности, на неровных дорогах, на подъемах и спусках. Также можно проверить его работу в разных освещенных условиях или при изменении температуры.
При проведении тестирования и отладки робота рекомендуется вести подробные записи о предпринятых действиях, обнаруженных проблемах и их решениях. Это позволит в дальнейшем быстро находить решение проблем, если они возникнут снова.
| Шаг | Действие | Результат |
|---|---|---|
| 1 | Проверка работы моторов | Моторы вращаются в обе стороны без шумов и требования дополнительной смазки |
| 2 | Проверка работы сервоприводов | Сервоприводы точно и плавно выполняют заданные углы поворота |
| 3 | Тестирование передвижения робота по командам с помощью джойстика | Робот корректно реагирует на команды джойстика и правильно перемещается |
| 4 | Тестирование выполнения задач с помощью робота | Робот успешно выполняет задачи, связанные с его функциями |
| 5 | Тестирование работы робота на различных поверхностях и в различных условиях | Робот стабильно работает и правильно выполняет свои функции в различных условиях окружающей среды |
Тестирование и отладка мобильного робота с помощью Raspberry Pi позволяют убедиться в его надежной и корректной работе, а также выявить и исправить возможные проблемы. Проведение тестов и отладки перед эксплуатацией робота поможет увеличить его эффективность и повысить качество работы.
Вопрос-ответ:
Какие материалы и компоненты нужны для создания мобильного робота с помощью Raspberry Pi?
Для создания мобильного робота с использованием Raspberry Pi вам понадобятся следующие материалы и компоненты: Raspberry Pi плата, шасси для робота, колеса и моторы, аккумулятор, контроллер моторов, драйверы двигателей, датчики и камера, провода и разъемы. Кроме того, вам потребуется компьютер для настройки Raspberry Pi и установки необходимых программ и библиотек.
Какую операционную систему можно использовать с Raspberry Pi для создания мобильного робота?
С Raspberry Pi можно использовать различные операционные системы, такие как Raspbian, Ubuntu Mate, Snappy Ubuntu Core и Windows 10 IoT Core. Для создания мобильного робота на основе Raspberry Pi, рекомендуется использовать Raspbian, так как он предлагает широкие возможности настройки и поддержку множества дополнительных модулей и библиотек.
Как программировать мобильного робота на Raspberry Pi?
Для программирования мобильного робота на Raspberry Pi можно использовать различные языки программирования, такие как Python, C/C++, Java и другие. Основным языком программирования, рекомендуемым для работы с Raspberry Pi, является Python. Для работы с GPIO (General Purpose Input/Output) пинами Raspberry Pi, которые используются для управления моторами и сенсорами робота, можно использовать библиотеку RPi.GPIO.
Какие датчики можно использовать для создания мобильного робота на Raspberry Pi?
Для создания мобильного робота на Raspberry Pi можно использовать различные датчики, такие как ультразвуковые датчики расстояния, инфракрасные датчики избежания препятствий, датчики цвета, датчики света и т. д. Эти датчики позволяют роботу получать информацию о своем окружении и принимать соответствующие решения для движения и взаимодействия с ним.
Как настроить беспроводное управление для мобильного робота на Raspberry Pi?
Для настройки беспроводного управления для мобильного робота на Raspberry Pi можно использовать различные способы, такие как Wi-Fi или Bluetooth. Для Wi-Fi управления можно использовать модули Wi-Fi, такие как Wi-Fi адаптеры или модули ESP8266, которые подключаются к GPIO пинам Raspberry Pi. Для Bluetooth управления можно использовать Bluetooth-модули или USB адаптеры, которые подключаются к Raspberry Pi. После подключения таких модулей и настройки соответствующего программного обеспечения, можно использовать смартфон или компьютер для беспроводного управления роботом.
Какие материалы мне понадобятся для создания мобильного робота с Raspberry Pi?
Для создания мобильного робота с Raspberry Pi вам понадобятся Raspberry Pi плата, шасси или рама, два постоянных тока (DC) мотора, два колеса, батарейный блок, контроллер мотора, драйвер мотора, провода, разъемы и крепежные детали.
Какой язык программирования лучше всего использовать для создания мобильного робота с помощью Raspberry Pi?
У Raspberry Pi есть поддержка множества языков программирования, включая Python, C++, Java и другие. Python часто рекомендуется для начинающих, так как является легким в освоении и имеет большую поддержку сообщества. Однако, если вы имеете опыт работы с другими языками программирования, вы также можете использовать их для программирования вашего робота.