
Роботика с использованием Raspberry Pi стала все более популярна в последнее время. Raspberry Pi — это одноплатный компьютер, который может использоваться для различных проектов. Создание автономного робота на базе Raspberry Pi представляет собой уникальную возможность изучить принципы электроники, программирования и механики одновременно.
В данной статье будет представлено пошаговое руководство по созданию автономного робота с использованием Raspberry Pi. Вам потребуется некоторые базовые знания программирования на языке Python и электроники, но не волнуйтесь, данное руководство предоставит все необходимые инструкции и объяснения.
Мы начнем с выбора компонентов и подключения Raspberry Pi к необходимым устройствам, таким как двигатели, сенсоры и камера. Затем мы научимся программировать робота, используя язык Python и библиотеки для работы с Raspberry Pi. В конце руководства ваш робот будет способен перемещаться, обнаруживать препятствия и даже делать фотографии!
Важно понимать, что создание автономного робота с Raspberry Pi — это проект, который требует терпения, трудолюбия и навыков в различных областях. Однако, если вы готовы вложить время и усилия, результат будет впечатляющим — вы сможете создать своего собственного автономного робота на базе Raspberry Pi, который будет выполнять различные задачи.
- Подготовка к созданию автономного робота на базе Raspberry Pi
- Установка необходимого программного обеспечения на Raspberry Pi
- Сборка и подключение компонентов для робота
- Настройка и программирование Raspberry Pi для управления роботом
- Шаг 1: Установка операционной системы
- Шаг 2: Подключение к Raspberry Pi
- Шаг 3: Установка программного обеспечения
- Шаг 4: Написание программы для управления роботом
- Вопрос-ответ:
- Какие материалы нужны для создания автономного робота на Raspberry Pi?
- Какие операционные системы можно использовать на Raspberry Pi для создания автономного робота?
- Как программировать автономного робота на Raspberry Pi?
- Как подключить и настроить датчики на автономном роботе на Raspberry Pi?
Подготовка к созданию автономного робота на базе Raspberry Pi
1. Приобретение Raspberry Pi:
Raspberry Pi — это одноплатный компьютер, который будет использоваться в качестве основы для вашего автономного робота. Вы можете приобрести Raspberry Pi в магазине электроники или через интернет.
2. Установка операционной системы:
После покупки Raspberry Pi необходимо установить операционную систему. Рекомендуется использовать операционную систему Raspbian, которая специально разработана для Raspberry Pi. Инструкции по установке операционной системы вы можете найти на официальном сайте Raspberry Pi Foundation.
3. Настройка Raspberry Pi:
После установки операционной системы необходимо выполнить несколько настроек Raspberry Pi. Настройте подключение к интернету, настройте язык и региональные параметры, а также установите обновления операционной системы.
4. Подключение камеры:
Если вам понадобится использовать камеру для вашего автономного робота, необходимо подключить его к Raspberry Pi. Обычно для этого используется разъем CSI (Camera Serial Interface).
5. Установка необходимых программ:
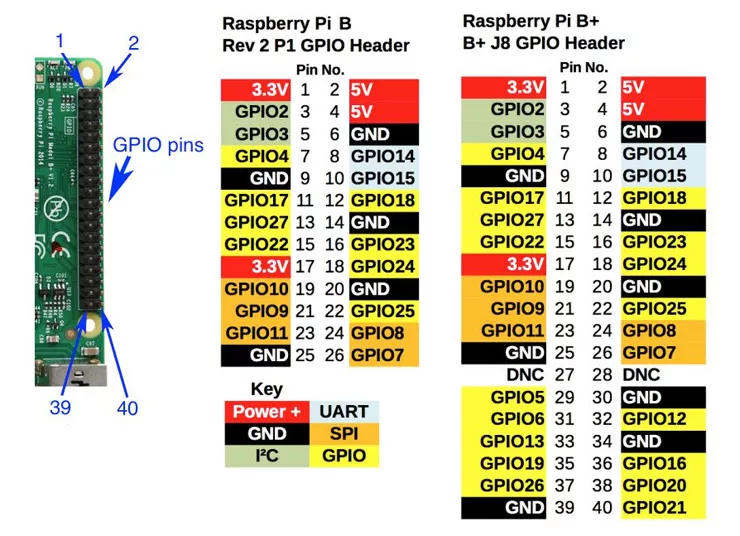
Для работы с Raspberry Pi и создания автономного робота вам понадобятся различные программы и библиотеки. Установите необходимые программы для работы с GPIO (General Purpose Input/Output) пинами и для управления моторами и датчиками.
6. Тестирование:
После завершения установки и настройки всех необходимых компонентов необходимо протестировать работу системы. Проверьте работу моторов, датчиков и камеры, а также убедитесь, что Raspberry Pi взаимодействует с вашим управляющим устройством, например, с пультом дистанционного управления.
7. Создание программного кода:
После успешного тестирования можно приступить к созданию программного кода для вашего автономного робота. Напишите код для управления моторами, чтения данных с датчиков, обработки изображений с камеры и других необходимых функций.
8. Тестирование и отладка:
После написания программного кода необходимо протестировать и отладить его. Убедитесь, что ваш автономный робот работает корректно и выполняет требуемые задачи.
9. Финальные штрихи:
После успешного тестирования и отладки вашего автономного робота остается провести финальные штрихи. Закрепите все компоненты робота на поверхности, добавьте необходимые декоративные элементы и убедитесь, что ваш автономный робот полностью готов к использованию.
Теперь, после завершения подготовки, вы готовы приступить к основной части работы – созданию функционального автономного робота на базе Raspberry Pi.
Установка необходимого программного обеспечения на Raspberry Pi
Перед тем, как начать создавать автономного робота на базе Raspberry Pi, необходимо установить необходимое программное обеспечение.
Первым шагом следует обновить операционную систему Raspbian до последней версии. Для этого можно воспользоваться командой:
sudo apt-get update
sudo apt-get upgradeПосле обновления операционной системы, следует установить необходимые пакеты для работы с GPIO портами Raspberry Pi:
sudo apt-get install python3-gpiozero python-rpi.gpioЗатем, следует установить дополнительные библиотеки для управления моторами и сенсорами:
sudo pip install adafruit-circuitpython-motorkit
sudo pip install adafruit-circuitpython-bno055Теперь необходимо установить библиотеку OpenCV для работы с камерой Raspberry Pi:
sudo apt-get install python-opencvДля управления Raspberry Pi с помощью Bluetooth, следует установить следующие пакеты:
sudo apt-get install bluetooth libbluetooth-dev
sudo pip install pybluezПосле установки программного обеспечения, Raspberry Pi готов к созданию автономного робота. Можно приступать к подключению компонентов и написанию кода.
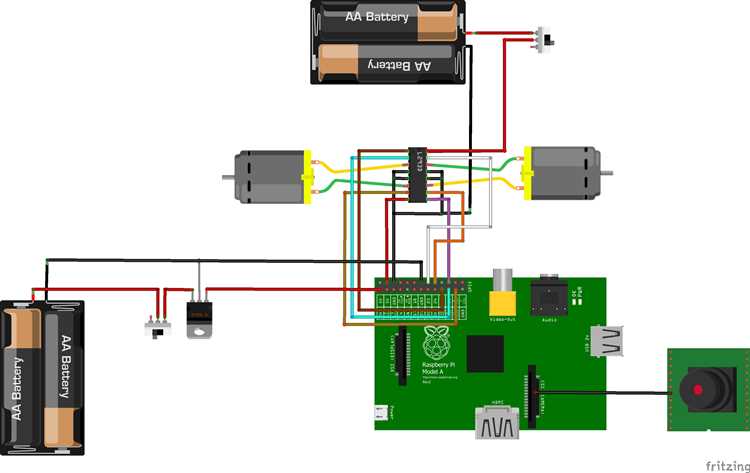
Сборка и подключение компонентов для робота
Прежде чем начать сборку робота, вам понадобятся следующие компоненты:
- Плата Raspberry Pi
- Моторы для привода колес
- Драйверы моторов
- Аккумуляторная батарея
- Колеса для робота
- Датчики для измерения расстояния (например, ультразвуковые датчики или ИК-датчики)
- Камера для видеозахвата
- Провода и разъемы для подключения компонентов
После того как у вас есть все необходимые компоненты, можно приступить к сборке робота.
- Сначала нужно подключить моторы к драйверам моторов. Проверьте правильность подключения и убедитесь, что моторы крутятся свободно.
- Подключите датчики к Raspberry Pi с помощью проводов. Учитывайте правильное соответствие выводов Raspberry Pi и датчиков.
- Соедините драйверы моторов с Raspberry Pi с помощью проводов. Убедитесь, что подключение сделано правильно.
- Подключите аккумуляторную батарею к Raspberry Pi для питания.
- Подключите камеру к Raspberry Pi с помощью соответствующего разъема.
- Закрепите колеса на моторах для привода.
После того как все компоненты подключены и закреплены, можно приступить к программированию робота и настройке его работы. Убедитесь, что все компоненты работают корректно и робот готов к использованию.
Настройка и программирование Raspberry Pi для управления роботом
Перед тем, как приступить к программированию Raspberry Pi для управления роботом, необходимо правильно настроить его на вашем компьютере. В этом разделе мы рассмотрим основные шаги, которые нужно выполнить для успешной настройки и программирования.
Шаг 1: Установка операционной системы
Первым шагом является установка операционной системы на Raspberry Pi. Наиболее популярной и подходящей для этой задачи является Raspbian — специальная версия Linux, разработанная для Raspberry Pi.
Для установки Raspbian необходимо загрузить образ операционной системы с официального сайта Raspberry Pi и записать его на SD-карту с помощью специальной программы для создания загрузочных карт SD.
Шаг 2: Подключение к Raspberry Pi
После установки операционной системы на Raspberry Pi, необходимо подключить его к вашему компьютеру. Для этого используются различные способы подключения, такие как Ethernet, Wi-Fi или Bluetooth.
Настройка подключения зависит от выбранного способа, поэтому следуйте инструкциям, чтобы правильно настроить соединение с Raspberry Pi.
Шаг 3: Установка программного обеспечения
После подключения Raspberry Pi и установки операционной системы, необходимо установить необходимое программное обеспечение для управления роботом.
Одним из способов программирования Raspberry Pi является использование языка программирования Python и его библиотеки RPi.GPIO. Для установки Python и RPi.GPIO выполните следующие команды в терминале Raspberry Pi:
sudo apt-get update
sudo apt-get install python rpi.gpio
Шаг 4: Написание программы для управления роботом
Наконец, настало время написать программу для управления роботом с помощью Raspberry Pi. В этой программе вы можете определить различные функции и команды для движения робота, а также для взаимодействия с его датчиками и актуаторами.
Используйте синтаксис Python и библиотеку RPi.GPIO для программирования Raspberry Pi. Вы можете создать класс или функции для управления роботом, а затем вызывать эти функции в основной программе для выполнения нужных действий.
Пример программы:
# Импорт библиотек
import RPi.GPIO as GPIO
# Настройка пинов
GPIO.setmode(GPIO.BOARD)
GPIO.setup(11, GPIO.OUT)
# Выполнение действий
GPIO.output(11, GPIO.HIGH)
Это лишь пример программы, и вы можете адаптировать его под свои потребности и требования вашего робота.
После написания программы, сохраните ее и запустите на Raspberry Pi. Вы увидите, как Raspberry Pi будет выполнять команды и управлять роботом.
Теперь, после завершения настройки и программирования Raspberry Pi, вы готовы к управлению автономным роботом!
Вопрос-ответ:
Какие материалы нужны для создания автономного робота на Raspberry Pi?
Для создания автономного робота на Raspberry Pi вам понадобятся следующие материалы: Raspberry Pi плата (любая модель), шасси или рама для робота, колеса и двигатели, драйверы двигателей, аккумулятор или батарейный блок, платформа для установки Raspberry Pi, датчики (например, датчики расстояния или ультразвуковые датчики), провода и разъемы для подключения всего оборудования. Также вам может понадобиться набор инструментов для сборки робота.
Какие операционные системы можно использовать на Raspberry Pi для создания автономного робота?
На Raspberry Pi можно установить различные операционные системы, такие как Raspbian, Ubuntu MATE, Windows 10 IoT Core и другие. Операционная система должна поддерживать работу с GPIO (General Purpose Input/Output), чтобы вы могли управлять подключенным оборудованием, таким как датчики и двигатели.
Как программировать автономного робота на Raspberry Pi?
Для программирования автономного робота на Raspberry Pi можно использовать различные языки программирования, такие как Python, C++ или Scratch. Для управления GPIO и другими периферийными устройствами Raspberry Pi рекомендуется использовать библиотеки, такие как RPi.GPIO для Python. Для создания алгоритмов и управления роботом можно использовать различные фреймворки и библиотеки, такие как ROS (Robot Operating System) или OpenCV (Open Source Computer Vision Library).
Как подключить и настроить датчики на автономном роботе на Raspberry Pi?
Для подключения датчиков к Raspberry Pi необходимо использовать GPIO пины. Каждый датчик имеет свою собственную схему подключения, которую нужно следовать в соответствующей документации. После подключения датчиков вы можете использовать соответствующие библиотеки программирования, чтобы считывать данные с датчиков и использовать их в своей программе. Настройка датчиков зависит от типа датчика и его спецификаций.
